@pennyloafers hey man, did it work?
i think i found the issue.
camera.rotation.z = sin(t_bob * BOB_FREQ_Y) * BOB_AMP_Y
when we start to bob head, our basis is no longer square with the world
and this code (as well as the previous code)
camera.rotation.x = -deg_to_rad(85) * sign(camera.transform.basis.z.y)
is making the wrong assumption about the x rotation. I think what happens is that we set the rotation and it causes the y axis to flip because we are setting the x ration to an impossible value that is only resolved by flipping the y axis, this is Euler’s fault… I think we need to use quaturnian in some way but i’m not smart enough to figure that out.
to fix this we need to rotate another way.
I fixed this with using your head instead of camera
@onready var head = $Pivot/Head
...
func _headbob(time) -> Vector3:
...
head.rotation.z = sin(t_bob * BOB_FREQ_Y) * BOB_AMP_Y
1 Like
oh my god it’s actually fixed, thank you so much brother, i will study more and take notes, you’re the best!
sorry that took me so long, I was a little baffled.
I think there is a trade off though with using the head, there is no advantage to using rotate_object_local as it won’t counter the head rotation since it isn’t happening on the camera anymore. this is only minor, and its up to you if that is a desired trait.
Don’t worry, it’s all good now, thanks for helping me ![]()
sorry one last note
I was also able to still use the camera if I changed the axis order on the camera to X axis first
defualt: YXZ
updated XYZ
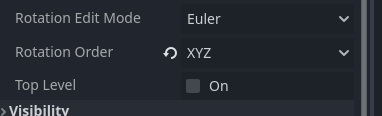
This also solves the issue, I think its because it basically makes X the master axis by rotating on it first.
1 Like
This topic was automatically closed 30 days after the last reply. New replies are no longer allowed.