Godot Version
4.2
Issue
I’m developing a car racing game in 3d and have encountered a problem with AI car steering - I use the built-in VehicleBody3D for AI vehicles and the steering doesn’t seem to be right. I have assumptions that this could have something to do with car rotating over 45 degrees(?). The forward velocity force toward the waypoint works almost fine (besides very aggressive slowdown when nearing a waypoint), but the steering works well only when making small steering corrections (for example a straight road with little steering applied ~20 degrees). Is there a problem with my way of doing this or is there something that has to be adjusted?

Demo:
- Straight + loop
34.41 MB file on MEGA
In this demo, the AI succeeds in driving to the first few waypoints, but fails at a waypoint loop, driving off in a completely unrelated direction
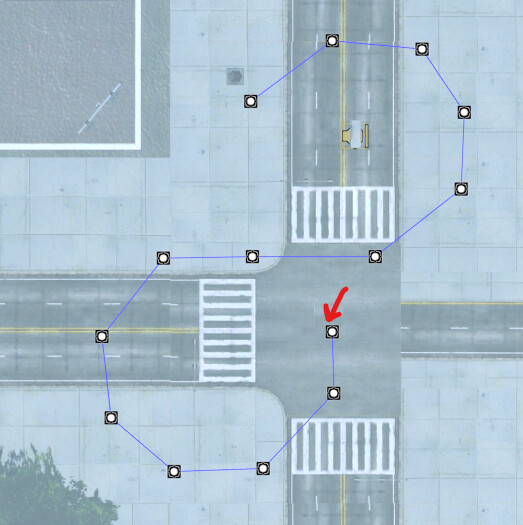
Here however, the waypoints begin with a loop (see image below with red arrow being the first waypoint), which results in the AI failing outright