Godot Version
4.5.1
Question
How can I get my multiple tilemaplayers to sort of “combine” so my enemy using a navigationagent2d can move properly instead of making paths that go through walls and trying to follow them
I’ve tried things like this:
extends TileMapLayer
var _obstacles: Array[TileMapLayer] = []
func _ready() -> void:
_get_obstacle_layers()
func _get_obstacle_layers():
# make sure the name here is the same as the group's
var layers = get_tree().get_nodes_in_group("Obstacles")
for layer in layers:
if layer is not TileMapLayer: continue
_obstacles.append(layer)
func _use_tile_data_runtime_update(coords: Vector2i) -> bool:
return _is_used_by_obstacle(coords)
func _is_used_by_obstacle(coords: Vector2i) -> bool:
for layer in _obstacles:
if coords in layer.get_used_cells():
var is_obstacle = layer.get_cell_tile_data(coords).get_collision_polygons_count(0) > 0
if is_obstacle:
return true
return false
func _tile_data_runtime_update(coords: Vector2i, tile_data: TileData) -> void:
if not _is_used_by_obstacle(coords):
tile_data.set_navigation_polygon(0, null)
but it doesnt work I dont even get an error
i’ve tried following Pathfinding Guide for 2D Top-View Tiles in Godot 4.3 - casraf.dev but it doesnt seem to work in godot 4.5 or atleast I couldnt get it to.
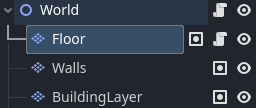
My Scene looks a little like this, this is the tilemaplayers I need to “combine” or make pathbindable
Also the player can build on a grid (so they can place tiles on the BuildingLayer tilemaplayer node, so I need the Floor layer to update and remove tiles/add tiles in realtime to respond to that
thanks in advance for the help!
1 Like
Godot Version
4.6.1
Sorry for editing so much, it’s my first time here. I don’t understand much English, I used Google Translate so there may be errors.
I managed to do it this way, using AI and some manual corrections. There might be easier ways to do it, but this one at least works.
extends CharacterBody2D
class_name PlayerWithAStarClickToMove
@export var ground_layer: TileMapLayer
@export var obstacle_layer: TileMapLayer
@export var speed: float = 130.0
@export var allow_diagonals: bool = false
@onready var path_line: Line2D = $"../PathLine"
const TILE_SIZE: int = 16
const CENTER_OFFSET: Vector2 = Vector2(8, 8)
var astar_grid: AStarGrid2D = null
var current_path: PackedVector2Array = []
var path_index: int = 0
func _ready() -> void:
if not ground_layer or not obstacle_layer:
push_error("Player: Defina ground_layer e obstacle_layer no Inspector!")
return
update_astar_grid()
snap_to_center()
func update_astar_grid() -> void:
if not ground_layer or not ground_layer.tile_set:
push_error("Player: ground_layer inválido!")
return
astar_grid = AStarGrid2D.new()
var map_rect: Rect2i = ground_layer.get_used_rect()
astar_grid.region = map_rect
astar_grid.cell_size = Vector2(TILE_SIZE, TILE_SIZE)
astar_grid.offset = CENTER_OFFSET
astar_grid.default_compute_heuristic = AStarGrid2D.HEURISTIC_MANHATTAN
astar_grid.default_estimate_heuristic = AStarGrid2D.HEURISTIC_MANHATTAN
astar_grid.diagonal_mode = (
AStarGrid2D.DIAGONAL_MODE_ONLY_IF_NO_OBSTACLES
if allow_diagonals
else AStarGrid2D.DIAGONAL_MODE_NEVER
)
astar_grid.update()
for x in range(map_rect.position.x, map_rect.end.x):
for y in range(map_rect.position.y, map_rect.end.y):
var cell := Vector2i(x, y)
if not _is_cell_walkable(cell):
astar_grid.set_point_solid(cell)
print("A* Grid atualizado | Região: ", map_rect, " | Diagonais: ", allow_diagonals)
func _is_cell_walkable(cell: Vector2i) -> bool:
var ground_data: TileData = ground_layer.get_cell_tile_data(cell)
if ground_data == null:
return false
var obstacle_data: TileData = obstacle_layer.get_cell_tile_data(cell)
if obstacle_data != null and obstacle_data.get_collision_polygons_count(0) > 0:
return false
return true
func _input(event: InputEvent) -> void:
if event is InputEventMouseButton:
if event.button_index == MOUSE_BUTTON_LEFT and event.pressed:
var click_global = get_global_mouse_position()
move_to_position(click_global)
func move_to_position(target_global: Vector2) -> void:
if not astar_grid:
return
var start_cell := ground_layer.local_to_map(ground_layer.to_local(global_position))
var target_cell := ground_layer.local_to_map(ground_layer.to_local(target_global))
if not astar_grid.is_in_boundsv(start_cell) or not astar_grid.is_in_boundsv(target_cell):
path_line.clear_points()
return
if astar_grid.is_point_solid(target_cell):
path_line.clear_points()
return
var local_path := astar_grid.get_point_path(start_cell, target_cell)
current_path.clear()
for local_pos in local_path:
var global_pos = ground_layer.to_global(local_pos)
current_path.append(global_pos)
path_index = 1
update_path_visual()
func update_path_visual() -> void:
if path_line == null:
return
path_line.clear_points()
if current_path.is_empty():
return
for point in current_path:
path_line.add_point(point)
func snap_to_center() -> void:
var current_cell = ground_layer.local_to_map(ground_layer.to_local(global_position))
var center_local = ground_layer.map_to_local(current_cell) + CENTER_OFFSET
global_position = ground_layer.to_global(center_local)
func _physics_process(delta: float) -> void:
if current_path.is_empty() or path_index >= current_path.size():
velocity = Vector2.ZERO
update_path_visual()
return
var target_point = current_path[path_index]
var direction = (target_point - global_position).normalized()
velocity = direction * speed
move_and_slide()
var distance_to_target = global_position.distance_to(target_point)
if distance_to_target < 4.0:
path_index += 1
update_path_visual()
if path_index >= current_path.size():
current_path.clear()
velocity = Vector2.ZERO
path_line.clear_points()
if path_index >= current_path.size():
current_path.clear()
velocity = Vector2.ZERO
if not current_path.is_empty():
global_position = current_path[-1]
if path_line:
path_line.clear_points()
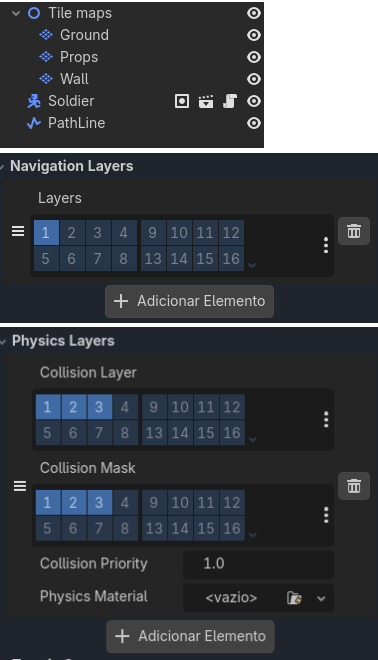
This is how my nodes are organized
Ground = Navigation layers
Wall = Physics Layers