Thanks, I actually managed to find and fix the issue before my post was approved, so couldn’t retract it. The problem was that I was assigning the Viewport’s texture to the material through the inspector, which doesn’t seem to work when running the project.
For reference I’ll still provide the shaders and the script (which I now edited to assign the texture on init).
The script:
func _ready() -> void:
var root = get_tree().root
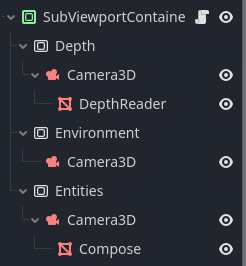
$Environment.size = root.size
$Entities.size = root.size
$Depth.size = root.size
$Depth/Camera3D.environment = $Environment/Camera3D.environment
$Depth/Camera3D/DepthReader.visible = true
$Entities/Camera3D/Compose.visible = true
var mat: Material = $Entities/Camera3D/Compose.get_active_material(0)
mat.set("shader_parameter/environment_color", $Environment.get_texture())
mat.set("shader_parameter/environment_depth", $Depth.get_texture())
The DepthReader shader (probably incorrect as I haven’t checked if the color depth is enough to store depth):
shader_type spatial;
render_mode depth_draw_never, unshaded, fog_disabled;
uniform sampler2D depth_texture: hint_depth_texture, repeat_disable, filter_nearest;
void vertex() {
POSITION = vec4(VERTEX.xy, 1.0, 1.0);
}
void fragment() {
ALBEDO.r = texture(depth_texture, SCREEN_UV).r;
}
The Compose shader:
shader_type spatial;
render_mode depth_test_disabled, unshaded, fog_disabled;
uniform sampler2D environment_color: repeat_disable, filter_nearest;
uniform sampler2D environment_depth: repeat_disable, filter_nearest;
uniform sampler2D entities_color: hint_screen_texture, repeat_disable, filter_nearest;
uniform sampler2D entities_depth: hint_depth_texture, repeat_disable, filter_nearest;
void vertex() {
POSITION = vec4(VERTEX.xy, 1.0, 1.0);
}
void fragment() {
float curr_depth = texture(entities_depth, SCREEN_UV).r;
float scene_depth = texture(environment_depth, SCREEN_UV).r;
if (curr_depth > scene_depth) {
ALBEDO = texture(entities_color, SCREEN_UV).rgb;
DEPTH = curr_depth;
} else {
ALBEDO = texture(environment_color, SCREEN_UV).rgb;
DEPTH = scene_depth;
}
}